



QGroundControl
Descrição de QGroundControl
O QGroundControl fornece controle e configuração completos de vôo para veículos com motor ArduPilot ou PX4 Pro. O objetivo do QGroundControl é melhorar a facilidade de uso de novos usuários, bem como o suporte a recursos avançados para usuários experientes.
Recursos do QGroundControl:
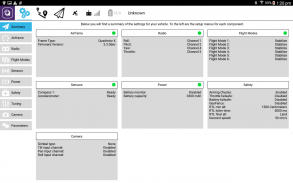
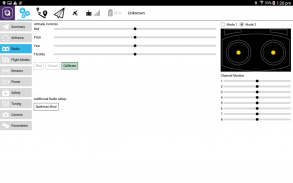
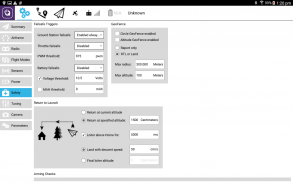
- Suporte de configuração completa para veículos que executam o firmware PX4 Pro e ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub)
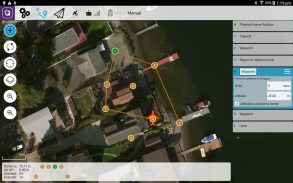
- Planejamento de missão para vôo autônomo
- Visualização do mapa de voo mostrando a posição do veículo, pista de voo, pontos de passagem e instrumentos do veículo
- Streaming de vídeo com sobreposições de exibição de instrumento
- Suporte de voo para qualquer veículo com capacidade para MAVLink
O QGroundControl também está disponível para Windows, MacOS, Linux e iOS.
Notas de versão
Site oficial do QGroundControl
Documentação
Suporte
QGroundControl - Versão 4.1.1
(29-01-2021)QGroundControl - Informação APK
Versão APK: 4.1.1Pacote: org.mavlink.qgroundcontrolÚltima Versão de QGroundControl
Outras versões







 3.55
3.55
 3.17
3.17



Apps na mesma categoria









